Multilayer Perceptrons
So far, we have studied models based on a single neuron. More precisely, from our discussions on perceptrons and their learning algorithms, we see that a single neuron model can learn a linear decision boundary. The same holds for SVMs when we directly apply those models to the dataset in the input space. By defining a suitable feature map to transform the dataset from the input space to a feature space, we can learn datasets that are not linearly separable. However, such feature maps have to be chosen manually (in perceptrons) or through kernel tricks (in SVMs), where the kernel needs to be chosen suitably. Many real-world problems give rise to nonlinearly separable datasets of high dimensions and involve more complex features. In such cases, it is more difficult to specify a feature map manually, and it is desirable to have a model that can learn its own representation directly from the data, which can lead to more accurate classifications.
A multilayer neural network learns complex patterns from a dataset by automatically extracting both the feature representation and the decision boundary. The main idea is to arrange many neurons together to form a layer, with each neuron extracting different features from the input. Further, by stacking multiple layers, the network learns a sequence of nonlinear transformations. For instance, the first layer may capture simple patterns, the next layer may build more complex features from them, further deeper layers may combine these features into highly abstract representations, and finally, the last layer can apply a simple linear classifier to separate the data. In this way, multilayer neural networks overcome the main limitation of single-neuron models and SVMs by learning both the feature representation and the decision boundary simultaneously, and also directly from a dataset.
A multilayer neural network can be viewed as a function that maps an input vector to an output vector. In other words, it implements a mathematical transformation from the input space to the output space. From this perspective, a neural network can be viewed as a universal function approximator, which can approximate an unknown function underlying a given dataset. When the output vector represents real values, the network can be used for regression or function approximation tasks. When the output vector represents class scores or probabilities, the network naturally serves as a classifier.
In this chapter, we introduce fully connected feedforward artificial neural networks (also called the Multilayer Perceptrons (MLPs)) as a natural extension of single-neuron models. In Section «Click Here», we begin with a mathematical definition of MLPs and then discuss the dimensions of weight matrices and bias vectors. We also list some commonly used nonlinear activation functions in Section «Click Here». Using simple illustrations, we demonstrate how activations shape the network’s output and decision boundaries.
Fully Connected Feedforward Networks
An artificial neural network (ANN) is a system consisting of layers of connected neurons that defines a parametric function mapping input vectors to output vectors. The parameters of an ANN are learnt from a dataset through a training process that enables the network to approximate the underlying relationship between the inputs and the outputs.
An ANN is typically organized into three components, namely,
- an input layer that receives the input vectors;
- a set of hidden layers that perform transformations through affine maps and activation functions; and
- an output layer that produces the final prediction or classification.
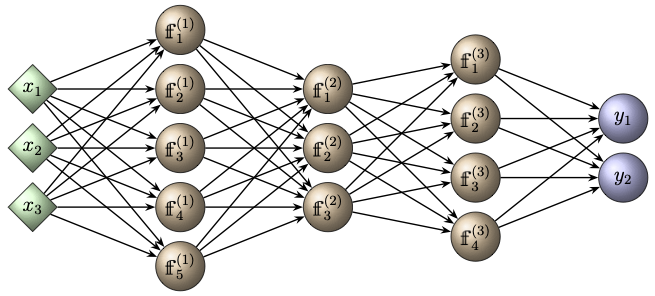
The multilayered structure of a deep neural network is illustrated in the following figure.
Definition and Network Dimensions
Having set the structure of ANNs intuitively, we now turn our attention to give the mathematical definition of a fully connected ANN.
For a given \(L\in \mathbb{N}\) and a set of network dimensions \(n_0,n_1, n_2, \ldots, n_L\in \mathbb{N}\), a fully connected artificial neural network of depth \(L\) and width \(\hat{n}=\max(n_1, n_2, \ldots, n_{L-1})\), is a parametric function \({\mathscr{F}_{L,\hat{n}}}: \mathbb{R}^{n_0} \rightarrow \mathbb{R}^{n_L}\) defined as
for all input vectors \(\boldsymbol{x}\in \mathbb{R}^{n_0}\).
Here, for each layer \(l=1,2,\ldots,L\), the layer function \( \mathfrak{h}^{(l)}: \mathbb{R}^{n_{l-1}} \rightarrow \mathbb{R}^{n_{l}}\) is the vector-valued neuron function of the \(l^{\rm th}\) layer
with each \(\text{𝕗}_{k}^{(l)}: \{-1\}\times \mathbb{R}^{n_{l-1}} \rightarrow \mathbb{R}\) being the neuron function defined in Definition «Click Here», and
being the \(n_{l} \times (n_{l-1}+1)\) augmented weight matrix, and \(\boldsymbol{\Theta}\) denotes the collection of trainable parameters of the network as
The layer corresponding to \(l=0\) is the input layer, and the layer with \(l=L\) is the output layer, whereas the layers for \(l=1,2,\ldots, L-1\) are the hidden layers with layer width \(n_l\).
which is a mapping \(\mathbb{R}^{n_0} \ni \boldsymbol{x} \mapsto \boldsymbol{y}\in \mathbb{R}^{n_L}\) obtained by passing the input vector \(\boldsymbol{x}\) successively through the hidden layers, starting from layer \(l=1\) up to layer \(l=L-1\), and finally through the output layer \(l=L\) to obtain the output vector \(\boldsymbol{y}\). Such a network is also called a feedforward neural network. A fully connected (or densely connected) feedforward neural network defined above is often referred to as a multilayer perceptron (MLP).
Training or learning an artificial neural network means obtaining a collection of trainable parameters \(\boldsymbol{\Theta}\) by optimizing a suitable cost function over the given training dataset. Recall the learning process as briefed in Subsection «Click Here» (in the context of supervised learning).
Shallow Networks
From Definition «Click Here» , we see that an ANN is defined as a composition of layers, where each layer applies an affine transformation followed by a nonlinear activation function. In this subsection, we construct an explicit form of a shallow network with one hidden layer, that is, \(L=2\).
Let the network dimensions be \(n_0, n_1, n_2\in \mathbb{N}\). From Definition «Click Here» , a shallow network with width \(\hat{n}=n_1\) is a function \({\mathscr{F}_{2,\hat{n}}}:\mathbb{R}^{n_0}\rightarrow \mathbb{R}^{n_2}\) given by
The augmented weight matrices are given by
for \(l=1,2\). We also write
From Definition «Click Here», the \(k^{\rm th}\) neuron of the \(l^{\rm th}\) layer is given by
where \(\overline{\boldsymbol{w}}^{(l)}_k = (b^{(l)}_k, w^{(l)}_{k1}, w^{(l)}_{k2}, \ldots, w^{(l)}_{kn_{l-1}})^\top\) and \(\overline{\boldsymbol{x}}^{(l-1)} = (-1, \boldsymbol{x}^{(l-1)})^\top\) are the augmented weight and input (column) vectors, respectively, \(\text{𝕒}:\{-1\}\times \mathbb{R}^{n_{l-1}}\rightarrow \mathbb{R}\) is the affine function given by
and \(\mathscr{A}^{(l)}: \mathbb{R} \rightarrow \mathbb{R}\) is the nonlinear activation function used in the \(l^{\rm th}\) layer.
For \(l=1\), \(\boldsymbol{x}^{(0)} = \boldsymbol{x}\in \mathbb{R}^{n_0}\) is the input vector, and for \(l=2\), \(\boldsymbol{x}^{(1)}\in \mathbb{R}^{n_1}\) is the output of the first layer given by
which is often referred to as the activation of that layer. Finally, at the output, we have
For notational convenience, we introduce the vector notation for the affine transformation and the activation function.
We define the affine function of the \(l^{\rm th}\) layer as the vector-valued function \(\underline{𝕒}:\{-1\}\times \mathbb{R}^{n_{l-1}} \rightarrow \mathbb{R}^{n_l}\) given by
where \(\boldsymbol{x}^{(l-1)}\in \mathbb{R}^{n_{l-1}}\) is the activation of the \((l-1)^{\rm st}\) layer, \(\boldsymbol{b}^{(l)}\in \mathbb{R}^{n_l}\) is the bias vector, and \(W^{(l)}\) is the \(n_l\times n_{l-1}\) weight matrix of the \(l^{\rm th}\) layer.
For a given activation function \(\mathscr{A}^{(l)}: \mathbb{R}\rightarrow \mathbb{R}\), we define the coordinatewise activation \(\underset{\overline{~~~~}}{\mathscr{A}}^{(l)}:\mathbb{R}^{n_l}\rightarrow \mathbb{R}^{n_l}\) as
where \(\boldsymbol{x}=(x_1,x_2,\ldots, x_{n_l})^\top.\)
Thus, the activation of the \(l^{\rm th}\) layer is the vector \(\boldsymbol{x}^{(l)}\in \mathbb{R}^{n_l}\) given by
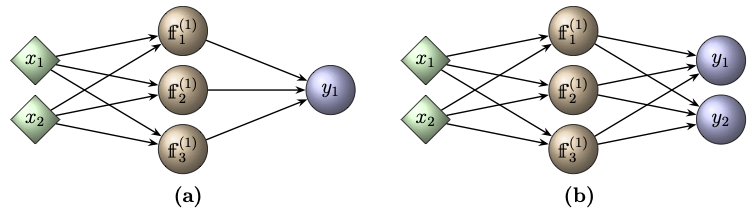
Let us write the explicit form of the ANN shown in Figure «Click Here» (a). The input layer has two features, i.e., \(n_0=2\). There are two layers with the hidden layer having \(n_1=3\) neurons. Thus, the depth of the network is 2 and the width is 3. Therefore, the ANN is the function \({\mathscr{F}_{2,3}}:\mathbb{R}^2\rightarrow \mathbb{R}\) with the trainable parameter
where
The affine function of the first layer is
Using the notations in (4.4), we obtain
The activation \(\boldsymbol{x}^{(1)}\) of the hidden layer is now obtained by applying the activation function \(\mathscr{A}^{(1)}\) of the first hidden layer on the above vector coordinatewise to get
Taking \(\boldsymbol{x}^{(1)}\) as the input, the output is then computed at the output layer as
Observe that the right hand side of the above expression is the ANN \({\mathscr{F}_{2,3}}(\cdot\,;\boldsymbol{\Theta})\) of the network depicted in Figure «Click Here» (a) given by (4.2), and its explicit expression is given by \begin{multline*} {\mathscr{F}_{2,3}}(\boldsymbol{x}^{(0)};\boldsymbol{\Theta}) = \mathscr{A}^{(2)}\Big( w^{(2)}_{11}\mathscr{A}^{(1)}\big( w^{(1)}_{11}x^{(0)}_1 + w^{(1)}_{12}x^{(0)}_2- b^{(1)}_1 \big)\\ + w^{(2)}_{12}\mathscr{A}^{(1)}\big( w^{(1)}_{21}x^{(0)}_1 + w^{(1)}_{22}x^{(0)}_2- b^{(1)}_2 \big)\\ + w^{(2)}_{13} \mathscr{A}^{(1)}\big( w^{(1)}_{31}x^{(0)}_1 + w^{(1)}_{32}x^{(0)}_2- b^{(1)}_3 \big) - b^{(2)}_1 \Big), \end{multline*} for every input vector \( \boldsymbol{x}^{(0)}\in \mathbb{R}^{2}\). The network has 13 trainable parameters given by
Batch Forward Propagation
The shallow network computations described in the previous subsection can be generalized to neural networks of arbitrary depth.
For fixed parameters \(\boldsymbol{\Theta}\), the network function \({\mathscr{F}_{L,\hat{n}}}:\mathbb{R}^{n_0}\rightarrow \mathbb{R}^{n_L}\) is well-defined. For every input vector \(\boldsymbol{x}\in\mathbb{R}^{n_0}\), the final output \(\boldsymbol{y}={\mathscr{F}_{L,\hat{n}}}(\boldsymbol{x}; \boldsymbol{\Theta})\) is evaluated recursively by taking the output of the \((l-1)^{\rm st}\) layer as the input to the \(l^{\rm th}\) layer, and computing
where \(\boldsymbol{x}^{(l)}\) is called the activation of the \(l^{\rm th}\) layer. This recursive evaluation procedure is referred to as the forward propagation of the activations.
Batch Propagation
Given a dataset
arrange the input vectors in the \(n_0\times N\) matrix form as
where each column corresponds to one sample.
To gain computational efficiency, it is preferable to perform forward propagation on the entire dataset in matrix form, rather than evaluating the ANN separately for each input vector.
Then the affine function takes the form
where \(\overline{A}^{(0)}\) is the augmented input matrix and the right hand side is a \(n_1\times N\) matrix.
Apply the activation function \(\underset{\overline{~~~~}}{\mathscr{A}}^{(1)}\) to get the activation matrix of the first layer as
Taking the activation \(A^{(1)}\) of the first layer as the input to the second layer, the activation of the second layer is computed using the formula
Proceed recursively as
In general, we have the following algorithm:
Input:
Processing:
For each layer \(l=1,2,\ldots, L\), perform the following computation:
For \(i=1,2,\ldots, n_l\)
For \(j=1, 2, \ldots, N\)
\(A^{(l)}_{ij} = \mathscr{A}^{(l)}(Z^{(l)}_{ij}).\)
Output: \(Y = A^{(L)},\) which is a \(n_L\times N\) matrix
A visualization of the above algorithm is shown in Figure «Click Here»

where \(\underset{\overline{~~~~}}{\mathscr{A}}^{(l)}_{n_l}\) denotes the activation function of the \(l^{\rm th}\) layer with the indication of the width of the layer as the suffix.
- Understand the following python code implementing the above forward propagation algorithm:
- Understand the following python code that implements forward propagation using TensorFlow-Keras:
- In the TensorFlow-Keras implementation of a feedforward neural network, the weights, biases, and batch input \(A^{(0)}\) are handled differently rather than the augmented matrix formats we used in the theoretical formulation.
- Describe how Keras stores the weight matrices and bias vectors for each layer, and compare this with the augmented weight matrix format \(W^{(l)}\) we used in theory.
- Explain the difference between the batch input format of \(A^{(0)}\) in Keras (i.e., NumPy/TensorFlow arrays) and the format we used in the theoretical framework (column-wise arrangement of samples) as well as in the first code above.
Activation Functions
The learning efficiency and the model performance of an ANN depend crucially on the choice of an activation function. In this subsection, we introduce a few commonly used activation functions. For clarity of exposition, we illustrate them using single neurons and shallow networks.
Step Functions
Let us start our discussion with a class of activation functions that we are already familiar from our discussions in the previous chapters.
Heaviside function
Unit step function of the Heaviside function is called the threshold activation function, given by
In terms of distributional derivatives, the derivative of the Heaviside function is given by \(\mathscr{H}'(x) = \delta(x)\), where \(\delta\) denotes the Dirac's measure.
Bipolar Function
The bipolar function is called the bipolar activation function and is given by
It is easy to see that \(\mathscr{B}(x) = 2\mathscr{H}(x) - 1\). Therefore, the distributional derivative of \(\mathscr{B}\) is given by \(\mathscr{B}'(x) = 2\delta(x)\).
The threshold and bipolar activation functions are used at the output layer of problems involving binary classification, which we studied in the context of perceptrons in the Chapter «Click Here».
Sigmoid Functions: Logistic Regression
A sigmoid function is a continuously differentiable function \(\mathscr{S}:\mathbb{R} \rightarrow (0,1)\), such that \(\mathscr{S}'>0\) (strictly increasing) and \(\mathscr{S}(s)\rightarrow 0\) as \(s\rightarrow -\infty\) and \(\mathscr{S}(s)\rightarrow 1\) as \(s\rightarrow +\infty\).
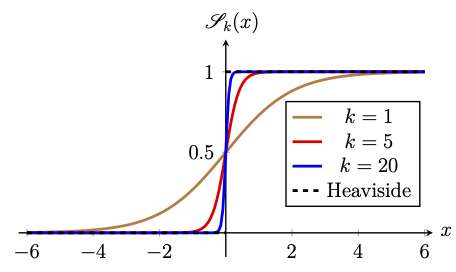
A commonly used sigmoid function is the logistic function with parameter \(k>0\) and is defined as
The graphs of the sigmoid function for various values of \(k\) are depicted in the following figure. From the figure, we observe that \(\mathscr{S}_k\rightarrow \mathscr{H}\) pointwise as \(k\rightarrow \infty\) on \(\mathbb{R}\backslash \{0\}\).
Since we use gradient-based optimization methods (such as gradient descent method) for learning a neural network, smooth activation functions like the logistic function are preferred over the Heaviside function, which is non-differentiable and constant almost everywhere. Moreover, the logistic function maps \(x \mapsto y \in (0,1)\) and hence its output can be interpreted as a probability. This makes it particularly useful in probabilistic models such as logistic regression.
Consider a dataset
If \(\mathcal{D}\) is linearly separable, then a perceptron can learn a separating hyperplane with weight \(\boldsymbol{w}\) and bias \(b\), and classify inputs by the rule
This is a hard classification rule that outputs only \(0\) or \(1\).
Instead of making a hard decision, we may ask the following question:
What is the probability that an input \(\boldsymbol{x}\) belongs to \(\mathcal{C}^+\)?
Using Bayes’ theorem, the posterior probability for the class \(\mathcal{C}^+\) can be written as
where \(\mathbb{P}\) denotes a probability measure, and \(p\) is the probability mass (or density) function associated with \(\mathbb{P}\).
Taking the ratio of posteriors, we get
which is referred to as the odds. The logarithm of the odds is called the logit or log-odds, and from the above expression, we see that the log-odds can be written as
where
is the likelihood ratio.
Assume that the log-likelihood ratio is linear in \(\boldsymbol{x}\), that is, there is a weight vector \(\boldsymbol{w}\) such that
for all input vectors \(\boldsymbol{x}\). Then the log-odds can be written as
where \(b = - \log\left( \tfrac{\mathbb{P}(\mathcal{C}^+)}{\mathbb{P}(\mathcal{C}^-)}\right)\) is treated as the bias.
Noting that \(\mathbb{P}(\mathcal{C}^- \mid \boldsymbol{x}) = 1 - \mathbb{P}(\mathcal{C}^+ \mid \boldsymbol{x})\) and solving the above equation for \(\mathbb{P}(\mathcal{C}^+ \mid \boldsymbol{x})\), we obtain
The interpretation of the above expression is as follows:
Given an input vector \(\boldsymbol{x}\), the probability that it belongs to the class \(\mathcal{C}^+\) is equal to the value of the logistic function \(\mathscr{S}_1\) at the point \(s = \langle \boldsymbol{w}, \boldsymbol{x} \rangle - b\).
Thus, estimating a weight vector \(\boldsymbol{w}\) and a bias \(b\) allows us to assign probabilities for each of the two classes \(\mathcal{C}^+\) and \(\mathcal{C}^-\). At the inference stage, by applying a suitable decision rule (for instance, thresholding at \(0.5\)), we obtain a binary (hard) classification. In the context of statistical learning, such a probabilistic classification model is called logistic regression.
Logistic regression can be viewed as a single artificial neuron with the neuron function as
for any given input vector \(\overline{\boldsymbol{x}}^{(0)}\in \mathbb{R}^{n_0}\). Thus, logistic regression can be trained as an artificial neuron to approximate the posterior probability of the positive class of a given dataset, so that the output is
Hard classification is then obtained during inference by applying a decision rule
where \(\hat{p}^*\in (0,1)\) is chosen based on applications. For instance, \(\hat{p}^*=0.5\) is a default choice.
Recall from the Subsection «Click Here» on Supervised Learning that to learn parameters \((b, \boldsymbol{w})\) of a model, we have to choose a suitable cost function. There is a natural choice of the cost function to train logistic regression, which we discuss in the following remark.
A natural training principle for logistic regression is to maximize the likelihood that the model assigns to the observed labels, given the predicted probabilities. Let us make this idea more precise:
For a single training example \((\boldsymbol{x}_i,y_i)\), the model predicts a probability \(\hat{p}_i = P(\mathcal{C}^+ \mid \boldsymbol{x}_i)\). The likelihood of observing the true label \(y_i \in \{0,1\}\) under this prediction is
For an entire training dataset \(\mathcal{D}_\text{train} = \big\{(\boldsymbol{x}_i,y_i) \mid i=1,2,\ldots, N_\text{train}\big\}\) having independent samples (examples) from the underlying joint distribution, the joint likelihood is the product
Rather than maximizing this product directly, it is more convenient to work with the log-likelihood
Thus, the training objective for logistic regression is to maximize the log-likelihood. Equivalently, minimizing the negative log-likelihood yields the cross-entropy cost function, given by
The cost function \(\mathcal{L}(\boldsymbol{w}, b)\) is smooth and convex, but it has no closed-form solution. The most suitable optimization algorithm is gradient descent (or its variants, such as stochastic gradient descent), which we will discuss in a separate section later.
Hyperbolic Tangent Function
The hyperbolic tangent function, also called the bipolar sigmoid function, is a map \(\mathscr{T}:\mathbb{R}\rightarrow (-1,1)\) defined as
This function can also be defined as
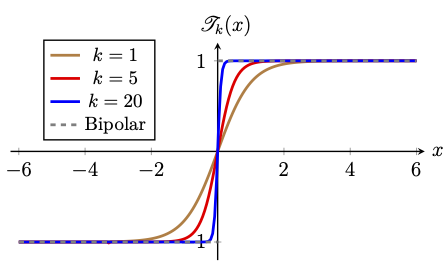
The graphs of the hyperbolic tangent function for various values of \(k\) are depicted in the above figure. From the figure, we observe that \(\mathscr{T}_k\rightarrow \mathscr{B}\) pointwise as \(k\rightarrow \infty\) on \(\mathbb{R}\backslash \{0\}\).
The hyperbolic tangent function is preferred over the bipolar function while learning an ANN using gradient-based optimization methods (such as gradient descent method).
The above problem shows that the tanh function is the logistic sigmoid stretched vertically (range doubled) and shifted downward by 1. Hence, the tanh activation function can be viewed as a particular affine transformation of the logistic sigmoid.
Bumped-type Functions
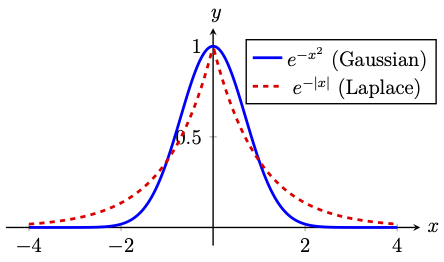
Bump functions are those which graphically resembles a bell-shaped curve, attains a maximum at some point, and decays rapidly to zero as \(x\rightarrow \pm \infty\).
For instance, the Gaussian bump \(\mathscr{G}_{\lambda,c}:\mathbb{R} \rightarrow (0,1]\), for fixed values of \(\lambda>0\) and \(c\in \mathbb{R}\), is defined as
Another example of a bump function is the Laplace bump \(\mathscr{L}_{\lambda,c}: \mathbb{R} \rightarrow (0,1]\), for fixed values of \(\lambda>0\) and \(c\in \mathbb{R}\) and is defined as
which is not smooth. The graph of the Gaussian and Laplace bumps with \(\lambda=1\) and \(c=0\) are depicted in the following figure.
Hockey-stick Functions
Any function whose graph resembles a hockey stick, i.e., an increasing L-shaped curve is a hockey-stick function.
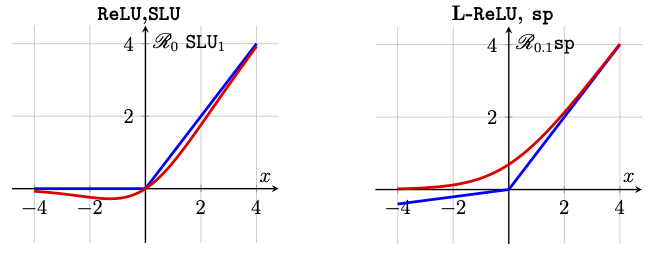
Leaky Rectified Linear Unit
We are already familiar with the rectified linear unit from the first chapter (see the Example «Click Here» ). We now define a general form of this function, called the leaky rectified linear unit with parameter \(\alpha\in [0, 1)\) as the function \(\mathscr{R}_\alpha :\mathbb{R} \rightarrow \mathbb{R}\) defined as
In particular, if we take \(\alpha=0\), we see that \(\mathscr{R}_0 = \texttt{ReLU}\) (see Example «Click Here»), which is the rectified linear unit defined as
Many modern network models use \(\texttt{ReLU}\) as the activation function. This is mainly because the learning rate of a network involving \(\texttt{ReLU}\) is several times faster than networks with other sigmoid activation functions.
Instead of choosing \(\alpha\in [0,1)\), if we treate \(\alpha>0\) as a trainable parameter, then the activation function \(\mathscr{R}_\alpha\) is called the parametric rectified linear unit.
Sigmoid Linear Units
Sigmoid linear units (also called swish) is a smooth function \(\texttt{SLU}:\mathbb{R}\rightarrow \mathbb{R}\) defined as
for a fixed parameter \(k>0\).
Softplus Function
Another smooth version of the \(\texttt{ReLU}\) function is the softplus function defined as
- \(\texttt{sp}(x) - \texttt{sp}(-x) = x.\)
- \(\texttt{sp}'(x) = \mathscr{S}_1(x).\)
Graphs of hockey-stick functions are depicted in the following figure.
Multi-class Classification
Multi-class classification refers to assigning exactly one class to each input out of a set of more than two possible classes.
In a multi-class classification, the outputs (targets/labels) are often categories (discrete class names), such as identifying whether a photograph depicts a cat, or a dog, or a cow. In this case, the output is \(y \in \{\text{`cat'}, \text{`dog'}, \text{`cow'}\}.\)
Since neural networks cannot handle symbolic categories directly, the target must be represented numerically. A canonical way of interpreting an \(n\)-class classification numerically is to use one-hot vector encoding, where each class is represented by an \(n\)-dimensional vector \(\boldsymbol{e}_i=(0,0,\ldots,1,0,\ldots, 0)\), for \(i=1,2,\ldots, n\), with \(1\) appearing at the \(i^{\rm th}\) coordinate.
For instance, the above example is a 3-class classification, which can be encoded by the three dimensional one-hot mapping as
One-hot encoding is the canonical way to represent categorical targets in multi-class classification.
Softmax Function
In a multi-class classification problem with \(n\) classes, a neural network produces a pre-activation vector of real numbers at the output layer as
whose entries are called the logits of the \(n\) classes.
To interpret these logits as probabilities of each class, we apply the softmax function as the activation function at the output layer to get the output as \(\boldsymbol{y} = (y_1, y_2, \ldots, y_n)^\top\), where
Thus, softmax is a function \(\texttt{sm}: \mathbb{R}^n \rightarrow \mathbb{R}^n\) defined by
The softmax plays the role of the logistic sigmoid in the multi-class setting in order to make the output vector \(\boldsymbol{y}\) a valid probability distribution over the \(n\) classes.
In the following example, we show that in the case of binary classification, the softmax reduces to the logistic sigmoid.
We can rewrite
Thus, binary logistic regression is a special case of the softmax with two classes.
In general, for a given \(k>0\), we define the softmax as
Calin, Ovidiu, Deep Learning Architectures: A Mathematical Approach, Springer, 2020.